2021/04/04
Part 4: Load and Speed Characteristics of an Actuator
Noticias/Artículos

Whether you are working on your company’s next large project or a “do it yourself” (DIY) task at home, there are many factors to consider when choosing the right electric linear actuator system for your application. By tailoring various combinations of spindle type, spindle specs, motor revolutions per minute (RPM), gear ratio, and the amount of power supplied to the actuator, TiMOTION can control the load and speed capabilities of the actuator. These characteristics are all dependent upon each other to operate a quality and durable linear actuator.
Type of Spindle
The type of spindle (or screw) will partly determine how fast the electric actuator moves and its load capability. TiMOTION produces electric actuators that feature one of two types of spindles, lead screws, and ball screws. There are three thread types for a lead screw: square thread, acme thread, and buttress thread.
Lead Screw
TiMOTION produces a lead screw with Acme thread (to fit an acme nut). Acme threads have a high load capacity but are not as fast as a ball screw due to increased friction caused between the nut and thread. However, the acme lead screw is a more economical and highly reliable solution that we can pass along to our customers. The majority of the electromechanical actuators that TiMOTION manufactures use the acme threaded lead screw, as seen in our TA2, TA4, TA6, TA23, and many more models.
TA2 |
TA4 |
 |
 |
TA6 |
TA23 |
 |
 |
Ball Screw
The other type of screw that TiMOTION utilizes within its electric linear actuators is the ball screw. The ball screw creates less friction than the acme screw because the threaded shaft provides a circular pathway for ball bearings (in a ball nut), which acts more precisely than the sliding friction caused by the acme nut. Because of this, the ball screw is more efficient and able to move at high speed. However, there is generally no self-locking force on a ball screw, so a brake mechanism can help with the back drive and holding the load in place. A ball screw is commonly used in our MA1 linear actuator model.
MA1 |
 |
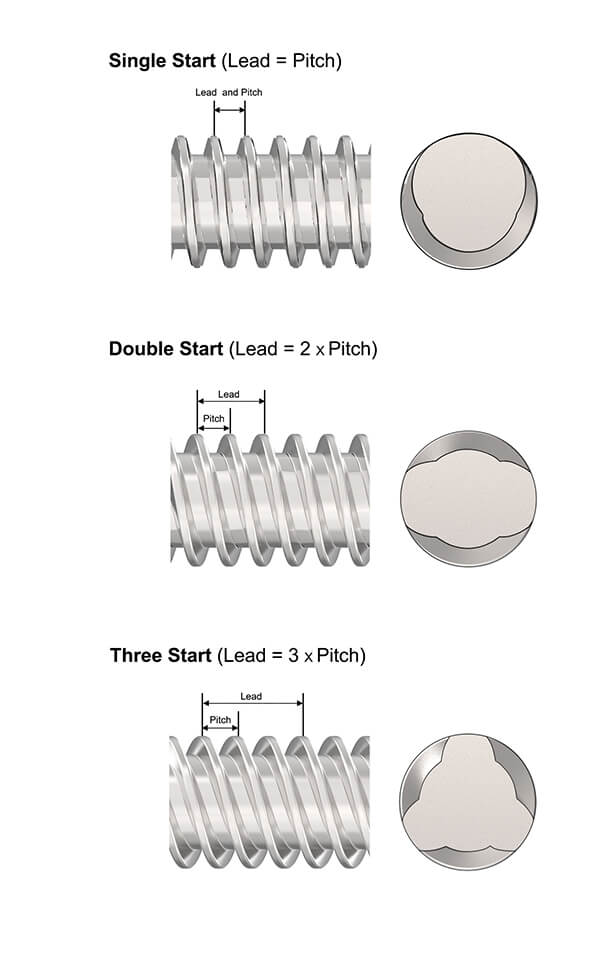
The spindle specifications also have a large effect on how fast the actuator moves, but mostly how much load it is capable of holding. The specs on a spindle (or screw) include the pitch, lead, and number of starts. The pitch is the axial distance from a crest on a screw thread to an adjacent thread's equivalent crest. The lead is the linear distance the screw travels in one complete turn (360 degrees) on the shaft. The start is the number of independent threads wrapped around the screw.
What does all of this mean? The angle of the thread determines how fast the nut travels up and down the shaft. The steeper the angle, the faster it moves, and vice versa. The more starts there are on the spindle, the steeper the thread angle (shown in the picture above). However, there is a trade-off between speed and self-locking ability. The faster the nut travels up and down the spindle, typically means the self-locking force decreases (the natural ability to hold a load in place once the nut comes to a stop).
RPM and Gear Ratio
Another thing to consider when controlling an actuator's speed and load is adjusting the gear set's RPM and gear ratio. The gear ratio is the ratio of the number of revolutions per minute (RPM) of the driver vs. the revolutions per minute (RPM) of the driven gear. For example, if a driver spur gear has 12 teeth on it and the driven spur gear has 24 teeth, the driven spur gear is twice as big as the driver gear. Since the drive gear must turn two times for every one turn of the driven gear, it has a 2:1 gear ratio.
There can also be additional gears added into the equation, depending on the trade-off between force and speed required, because force and speed are linked in an actuator by the formula “Mechanical Power = Force * Speed.” So, what does all of this mean? Suppose the load required on a particular application is heavy. In that case, TiMOTION can add more gears and adjust the gear ratio to create more torque on the actuator, which ultimately puts more force on the spindle allowing it to travel.
Mechanical Power Required
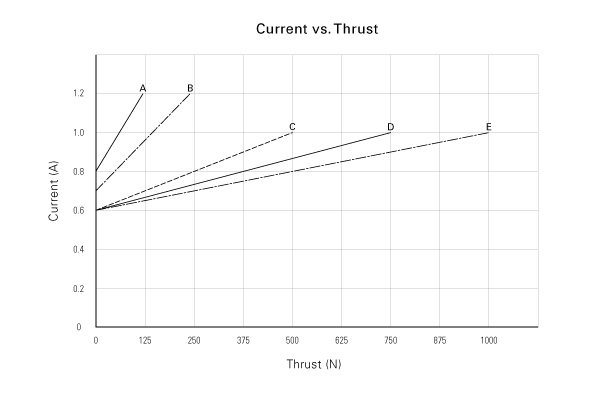
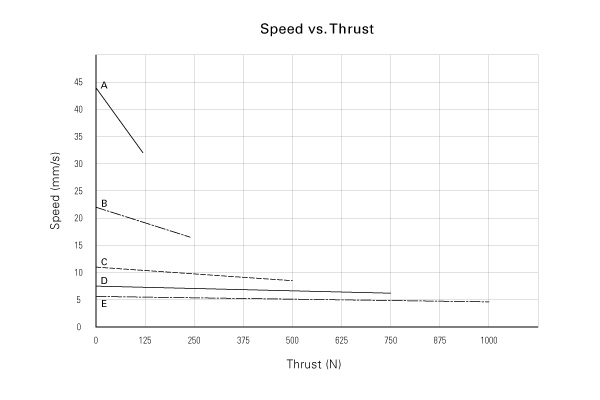
When manipulating a linear actuator's load and speed, one can also consider the amount of mechanical power required for the application (the power is measured in watts). The main point to remember about current, speed, and load in DC motors is that when the load increases, the current will increase, and the speed will then tend to decrease (as shown in the charts above). Besides this primary relationship, many other electromechanical parameters influence load and speed, like the kind of power supply used or the motor's efficiency. The engineers of TiMOTION are in charge of selecting the right parameters to meet our client's application needs.
TiMOTION offers power supplies to support our 12V DC, 24V DC, or 36V DC linear actuators. Since most of TiMOTION's actuators run on direct current (DC) power, our control boxes can convert alternating current (AC) power to DC power so customers can plug their applications into the wall. TiMOTION can integrate SMPS transformers (switch mode power supply) and toroidal transformers into the control boxes. SMPS transformers support 110V AC and 220V AC inputs, allowing our customer to plug their products into different outlets worldwide.
Below are three charts to help with term usage and conversions. The first is common voltage expressions that can be used interchangeably, the second is the conversion of Newton (N) to Pounds (Lbs.) and kilograms (kg), and the last is the conversion of Millimeters (mm) to Inches (In):
Voltage Expressions
| 12 Volts DC | 12V DC | 12 VDC |
| 24 Volts DC | 24V DC | 24 VDC |
| 36 Volts DC | 36V DC | 36 VDC |
| 48 Volts DC | 48V DC | 48 VDC |
| 110 Volts AC | 110V AC | 110 VAC |
| 220 Volts AC | 220V AC | 220 VAC |
Weight Conversion (N to lbs. and kgs)
| 1 Newton (N) | .22481 Pound (lbs) |
| 1 Newton (N) | .1 Kilogram (Kg) |
Distance (mm to in.)
| 1 Millimeter (mm) | .03937 Inch (in) |
We hope this has helped you develop a better understanding and foundation for electric linear actuators. In our next installment, we will look at the levels of IP ratings for liquid and dust protection that can be added to an electric actuator, as well as lubrication that goes into a linear actuator. If you have further questions and/or would like help with your next application, TiMOTION would be glad to assist you. We specialize in partnering with our clients while providing quality solutions for their linear motion system needs.
Artículos Relacionados

Por qué TiMOTION es el socio ideal para sus proyectos de automatización

Parte 1: ¿Qué es un actuador lineal eléctrico y cómo elegirlo?

Actuadores lineales impermeables IP54 a IP69K

Actuadores lineales de 12 V: potencia de 1000 N a 10 000 N

Actuadores lineales compactos TiMOTION: aplicaciones y modelos
Parte 5: El Grado IP de los Actuadores Lineales a Prueba de Polvo y Agua

¿Cómo elegir un actuador lineal eléctrico?

Parte 3: Actuadores Lineales Eléctricos con Opción de Seguridad Integrada

Actuadores eléctricos en coches de carreras autónomos: una colaboración con la Universidad de La Sapienza en Italia
