2022/01/09
Der Leitfaden für elektrische Linearaktuatoren
Nachrichten / Artikel
Einführung
Wann immer ein Gerät eine Last schiebt, zieht, hebt, senkt, positioniert oder dreht, ist meist ein elektrischer Linearzylinder beteiligt. Elektrozylinder sind Geräte, die zuverlässige und präzise Bewegungen in allen Arten von Anwendungen ermöglichen. Sie haben den Vorteil, dass sie im Gegensatz zu Hydraulik- oder Pneumatikzylindern leckage- und wartungsfrei sind und eine lange Lebensdauer haben.
Der Bedarf an Automatisierung hat in den letzten Jahren exponentiell zugenommen. Überall, wo die Moderne Einzug hält, entsteht ein automatisiertes System. Wo auch immer man hinschaut, findet man mindestens eine der drei Arten von Elektrozylindern (Elektrolinearzylinder, Hubsäulen, Getriebemotoren) in unendlich vielen Anwendungen.
Seit mehr als 15 Jahren fertigt und liefert TiMOTION elektrische Linearantriebe an Hersteller von industriellen und medizinischen Geräten sowie von professionellen und privaten Möbeln. Unser Ziel? Eine maßgeschneiderte Lösung anbieten.
TiMOTION bietet eine breite Palette von Elektrozylindern und zugehörigen Technologien mit sehr spezifischen Eigenschaften. Unsere internationalen Teams untersuchen jedes Projekt sorgfältig, um den Bedarf zu verstehen und die ideale Produktkombination für jede Anwendung zu finden.
Der Auswahlprozess ist entscheidend für die Bestimmung eines qualitativ hochwertigen elektrischen Antriebssystems für jedes Projekt. TiMOTION wird Sie als Ihr Partner durch diesen Prozess begleiten, damit Sie die richtige Wahl treffen können. Dieser Leitfaden wurde zusammengestellt, um Ihnen Informationen zur Verfügung zu stellen. Er führt Sie Schritt für Schritt zu allem, was Sie wissen müssen, um Ihr Projekt in Gang zu bringen und die beste Lösung für Ihre Ausrüstung zu finden.







|
|
Kapitel 1: Was ist ein elektrischer Linearantrieb und wie wählt man ihn aus? |
In diesem ersten Teil werden wir erörtern, was ein Linearantrieb ist, welche verschiedenen Arten von elektrischen Antrieben es gibt und wie Sie die richtigen für Ihre Anwendungen auswählen.
Was ist ein elektrischer Linearantrieb?
Ein elektrischer Linearantrieb ist eine Vorrichtung, die die Drehbewegung eines Motors in eine lineare Bewegung umwandelt. Es kann in jedes Gerät integriert werden, um eine Last zu schieben, zu ziehen, zu heben, zu senken, zu positionieren oder zu drehen.
TiMOTION hat sich auf elektrischen Antrieb und Bewegungssysteme für medizinische, industrielle, häusliche und Büroanwendungen spezialisiert.
Ein elektromechanischer Linearantrieb hat viele Komponenten und Optionen. Durch die vertikale Integration entwirft, fertigt und passt TiMOTION all diese Komponenten, einschließlich Motoren, Schneckenräder und Spindelmuttern, entsprechend seinen Kunden und deren Anwendungen an.
Wir spritzen sowohl unsere eigenen Kunststoffteile als auch unsere elektronischen Platinen ein, um die Qualität und Haltbarkeit unserer Produkte zu garantieren. Wir können die Programme optimieren und die verschiedenen Bewegungen integrieren, die für eine Anwendung erforderlich sind. So ist es zum Beispiel möglich, die synchronisierte Bewegung von zwei elektrischen Antrieben dank der Positionsinformation zu erhalten.
Die verschiedenen Arten von elektrischen Antrieben
TiMOTION konstruiert und fertigt verschiedene Arten von elektrischen Linearantrieben, die alle austauschbar sind und je nach Kundenwunsch und Anwendung angepasst werden können.
Antriebe mit dem Getriebe parallel zur Bewegungsrichtung
Der Motor ist parallel zur Schnecke. Parallele elektrische Wagenheber werden normalerweise von Stirnradgetrieben angetrieben, die eine größere Auswahl an Übersetzungsverhältnissen bieten. Diese Hubzylinder ermöglichen einen größeren Bereich von Lasten und Geschwindigkeiten. Einige Beispiele für TiMOTION Parallelantrieb: MA2, MA5, TA2P.

Rechtwinklige oder "L"-förmige elektrische Antrieb
Der Motor ist senkrecht zum Schneckenrad angeordnet. Elektrische L-Antrieb werden in der Regel über Schneckengetriebe angetrieben. Diese Hubzylinder sind leise und bieten eine erhöhte Irreversibilisierungskraft. Einige Beispiele für rechtwinklige TiMOTION Antrieb: TA43, TA23, TA31, TA37.

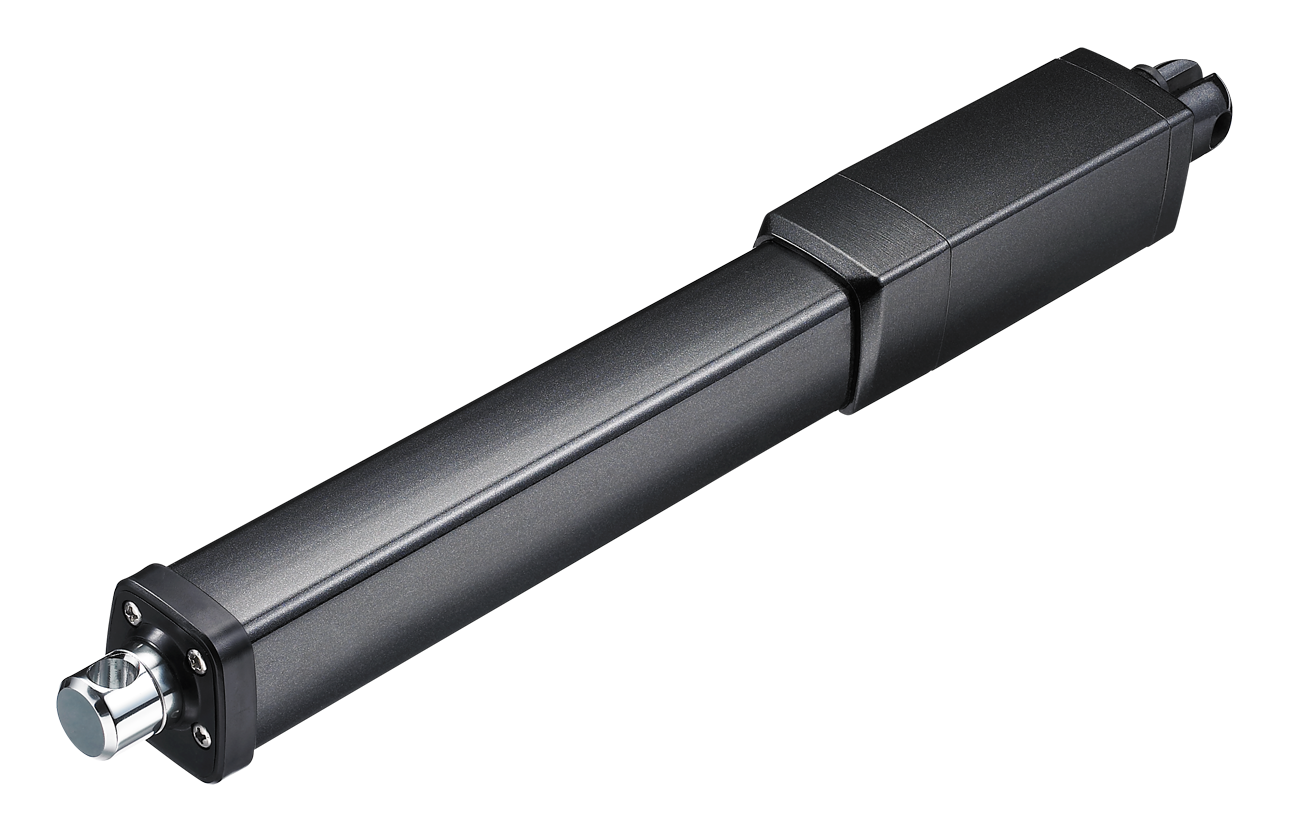
Elektrische Inline-Antriebe
Der Motor steht in einer Linie mit dem Schneckenrad. Inline-Antriebe haben daher eine größere eingezogene Länge. Sie werden in der Regel von einem Planetenradsatz angetrieben und sind speziell für den Einbau in enge Räume konzipiert. Einige Beispiele für TiMOTION Reihenantrieb: JP3 und JP4.
Getriebemotoren
Getriebemotoren ermöglichen die Konstruktion wirtschaftlicher und vielseitiger Systeme, wenn sie mit einem oder mehreren Schneckengetrieben kombiniert werden. Sie sind kompakt, werden in der Regel über Schneckengetriebe angetrieben und sind eine ideale Wahl für die mechanische Synchronisierung. Einige Beispiele für TiMOTION Getriebemotoren: TGM1, TGM2, TGM3, TGM4, TGM5 und TGM7.

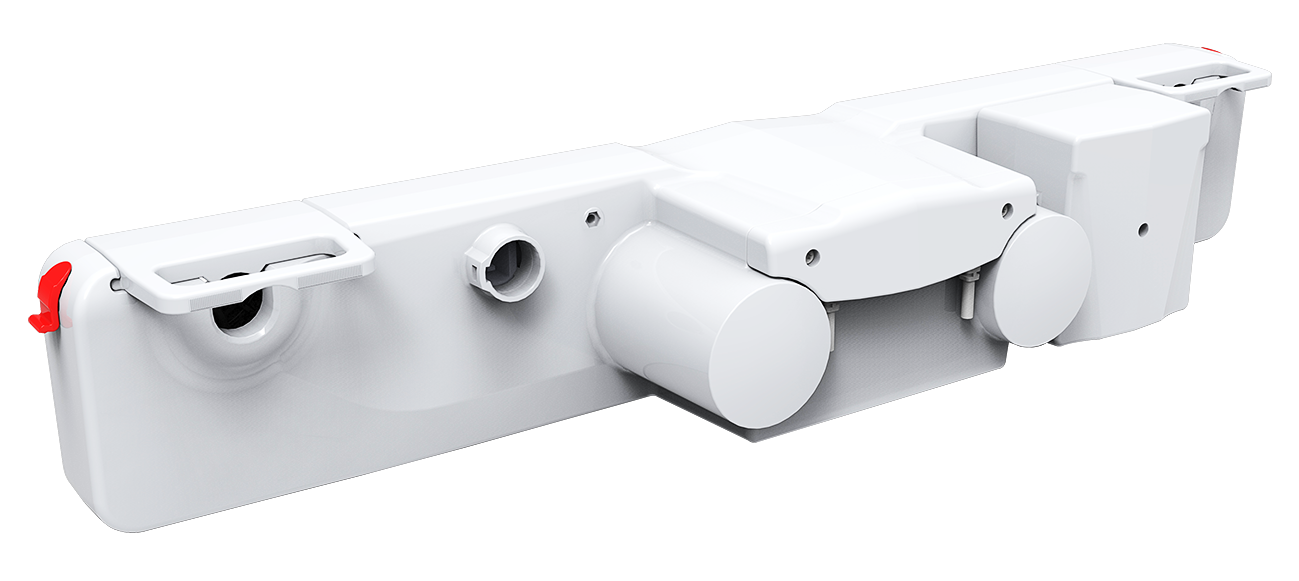
Zwei Motoren
Die Doppelantriebe bewegen sich in zwei verschiedene Richtungen, unabhängig oder gleichzeitig. Sie werden in der Regel über Schneckengetriebe angetrieben und bieten daher eine leisere Bewegung. Der Doppelantrieb bietet erhebliche wirtschaftliche Vorteile, da 2 Bewegungsmodule inkl Steuerung in einem Gehäuse untergebracht sind und eine schnelle Endmontage in der Anwendung sicherstellen. Der Doppelmotor TiMOTION TT1 ist ein Beispiel dafür.
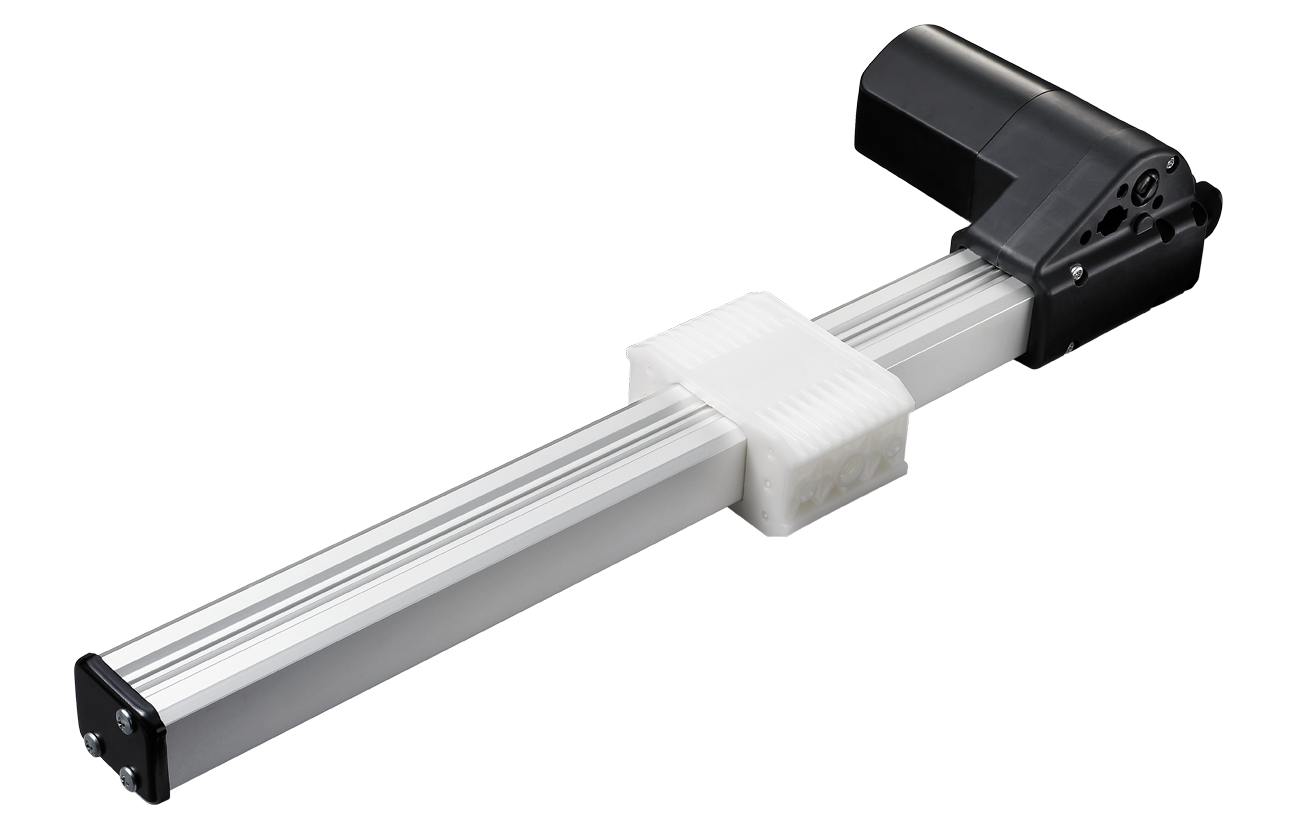
Antriebe mit Bewegungsblock
Elektrische Antriebe mit Bewegungsblock ermöglichen lineare Bewegungen ohne die Notwendigkeit eines Außenrohrs. Der vordere Aufsatz ist mit der Spindelmutter verbunden, die sich entlang der Schneckenschraube bewegt. Einige Beispiele für elektrische TiMOTION Antriebe: TA5P.
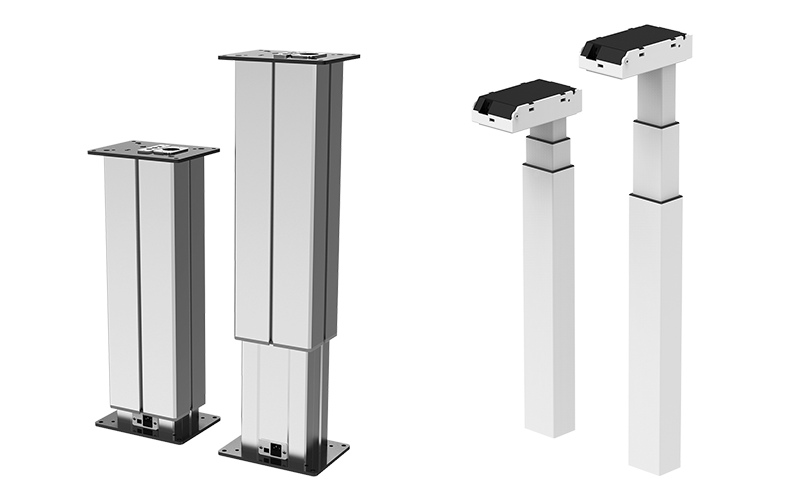
Elektrische Säulen mit variabler Höhe
TiMOTION stellt Hubsäulen für industrielle, medizinische und ergonomische Anwendungen her. Sie ermöglichen die vertikale Bewegung von hohen Lasten bei gleichzeitig hoher Stabilität. Unsere Industrie- und Medizinsäulen sind für Anwendungen wie medizinische Betten, Adipositasbetten oder höhenverstellbare Industriearbeitsplätze konzipiert. So gewährleisten sie die Sicherheit und den Komfort aller Benutzer. Einige Beispiele für TiMOTION Elektrosäulen für industrielle und medizinische Anwendungen: TL3, TL17, TL27, TL10H, TL18AC.
TiMOTION bietet auch eine Reihe von ergonomischen Säulen nach dem BIFMA-Standard für Büros mit variabler Höhe an. Diese Säulen sind in verschiedenen Farben, Formen und Ausrichtungen sowie in 2- oder 3-stufiger Ausführung erhältlich. Einige Beispiele für ergonomische TiMOTION Ergonomie Säulen für höhenverstellbare Schreibtische: TL4, TL5, TL7, TL9, TL13, TL14 und TL15.
Wie wählen Sie den richtigen Elektrische Antrieb für Ihre Anwendung?
Die Wahl des richtigen elektrischen Stellantriebs ist der Schlüssel zu jedem erfolgreichen Automatisierungsprojekt. Es gibt viele Modelle von Antrieb mit Parallel-, L-Getriebe-, Inline-Antrieben, die in einer Vielzahl von Anwendungen eingesetzt werden können.
Jedes Bedürfnis ist einzigartig. Um Ihnen bei der Wahl des richtigen Stellantriebs zu helfen, müssen die Anwendung und ihre technischen Anforderungen berücksichtigt werden: Geschwindigkeit, Last, Arbeitszyklus, verfügbarer Platz und Umgebung, um nur einige zu nennen.
Bestimmen Sie die erforderliche Belastung
Die zu tragende Last ist ein entscheidender Faktor bei der Wahl des Antriebs und bestimmt die verschiedenen Komponenten, aus denen er besteht (Motor, SpindelMutter, Spindel, Getriebe, Kugellager usw.).
Es ist wichtig zu bestimmen, in welche Richtung der Antrieb wirken muss (Zug, Schub, vertikale oder horizontale Verschiebung) und auf welche Länge.
Sie hängt auch vom Durchmesser des Innen- und Außenrohrs des Antriebs ab. All diese Faktoren beeinflussen die Fähigkeit des Antriebs, Lasten zu heben.
Die Einschaltdauer bestimmen
Das Einschaltdauer definiert das Verhältnis zwischen der Ein- und Ausschaltzeit eines Gerätes und variiert von Anwendung zu Anwendung erheblich. Das Tastverhältnis ist ein entscheidender Faktor bei der Auswahl des Aktuators, seiner Materialien und Mechanismen. Sie trägt dazu bei, den Geräten eine optimale Lebensdauer zu verleihen und die Geschwindigkeit des Verschleißes mechanischer Teile oder einer möglichen Überhitzung zu begrenzen.
Bestimmen Sie den verfügbaren Platz
Die Wahl des Antriebs richtet sich auch nach dem im System verfügbaren Platz.
Zusätzlich zu Last, Hub und Geschwindigkeit ist es wichtig zu wissen, ob der Antrieb in einem begrenzten Raum arbeiten muss, ob es Platzbeschränkungen gibt, um eine Integration in die Anwendung zu ermöglichen.
Bestimmung der Umgebung
Die Umgebung, in der das Gerät betrieben wird, ist ein entscheidender Parameter bei der Wahl des richtigen elektrischen Stellantriebs. Funktioniert das Gerät in Innenräumen oder im Freien? Ist es Staub, festen Verunreinigungen oder Feuchtigkeit ausgesetzt? Muss es einer intensiven Reinigung mit Reinigungsmitteln oder Hochdruckreinigung standhalten? Abhängig von den Umweltanforderungen unterscheiden sich die verwendeten Materialien und die Schutzklasse (IP).
Die Wahl eines Elektrozylinders hängt also von vielen Parametern ab. Es ist wichtig, einen Linearantrieb zu wählen, der die Anforderungen der Anwendung erfüllt.
Jede Anwendung hat eine Reihe von Anforderungen, die bei der Auswahl des richtigen Elektrozylinders nicht außer Acht gelassen werden dürfen. Aber auch das Budget spielt bei der Wahl eine Rolle. Es kommt darauf an, all diese Parameter zu bewerten, um das am besten geeignete System zu entwickelt.
|
|
Kapitel 2: Vergleich verschiedener Arten von Zylindern |
Es gibt 3 verschiedene Arten von Zylindern - pneumatische, hydraulische und elektrische - und viele Missverständnisse über sie. Auch wenn für bestimmte Anwendungen ein bestimmter Zylindertyp empfohlen wird, haben technologischer Fortschritt und Innovation eine größere Austauschbarkeit ermöglicht, so dass es mehr Optionen für Ihr Projekt gibt.
Zunächst ist es jedoch wichtig zu verstehen, wie jedes dieser Systeme funktioniert, um die für Sie passende Wahl treffen zu können.
Drei Arten von Zylindern
Pneumatische Linearantriebe
Der Pneumatikzylinder ist ein Antrieb, der pneumatische Energie (Druckluft) in mechanische Energie (Bewegung) umwandelt. Diese Bewegung besteht aus einem Kolben, der sich entlang einer Metallstange in einem Zylinder bewegt, der aus zwei leeren Räumen, den sogenannten Kammern, besteht. Wenn komprimierte Luft in eine der Kammern eintritt, wird der Kolben gedrückt, wodurch die Luft aus der anderen Kammer herausgedrückt wird. Diese Energieübertragung macht die Bewegung des Pneumatikzylinders möglich.
Hydraulische Linearantriebe
Ähnlich wie Pneumatikzylinder arbeiten hydraulische Linearzylinder durch Komprimierung einer Flüssigkeit (in der Regel Öl), die von einer Pumpe in das Innere des zylindrischen Rohrs eingespritzt wird. Der Mechanismus ist derselbe, da der von dieser Flüssigkeit freigesetzte Druck die lineare Bewegung des Rohrs entlang der Kolbenachse antreibt.
Hydraulische Linearantriebe können sehr hohe Lasten bewältigen und bieten größere Hublängen, sind jedoch nicht programmierbar.
Elektrische Linearantriebe
Die kompakten und programmierbaren elektrischen Linearantriebe bieten hohe Kraft, Präzision und Geschwindigkeit mit kontrollierter Beschleunigung und Verzögerung. Elektrische Linearantriebe wandeln die Rotationskraft eines Motors (elektrische Energie) in eine lineare Bewegung (Drehmoment) um. Bei Aktivierung durch den Motor dreht die Schnecke die Mutter auf und ab und führt so die Druck- oder Zugbewegung der Last aus. Elektrische Linearantriebe sind eine gute Alternative zu pneumatischen oder hydraulischen Antrieben. Es kann kein Öl austreten und sie haben auch keine zusätzlichen Schläuche und Kompressoren. Sie sind zuverlässig und erfordern im Gegensatz zu ihren Alternativen keine regelmäßige Wartung.
Vorteile und Nachteile
Jeder Antriebstyp hat spezifische Eigenschaften, die Sie kennen sollten, um den für Ihre Anwendung am besten geeigneten Linearantrieb auszuwählen.
Indem Sie die wesentlichen Merkmale Ihres Projekts von Anfang an festlegen, können Sie den/die Linearantrieb(e) ausschließen, der/die Ihre Anforderungen nicht erfüllen kann/können. Schätzen Sie dann einfach die Gesamtkosten des potenziellen linearen Antriebssystems, einschließlich der Erstinvestition, der Betriebs-, Wartungs- und Reparaturkosten sowie der Kosten für potenzielle Risiken, die mit jedem Systemtyp verbunden sind, und vergleichen Sie, welches System für Ihr Projekt am attraktivsten ist.
|
Eigenschaften |
Pneumatischer Zylinder |
Hydraulischer Zylinder |
Elektrischer Zylinder |
|
System |
Einfaches System |
Mäßig komplexes System |
Präzises Kontrollsystem. Mehrfache und komplexe Verwaltung verschiedener Geräte. |
|
Stromverbrauch |
Hoch |
Sehr hoch |
Hoch |
|
Kontrolle |
Einzelne Ventile |
Benutzereingriff erforderlich |
Elektrische und flexible Steuerung mit einem elektronischen Steuergerät |
|
Positionierung |
Genaue Positionierung ist schwierig zu erreichen |
Die Positionierung in der Mitte des Hubs erfordert zusätzliche Komponenten und Einsatz von Personal |
Positionierung und Geschwindigkeitssteuerung möglich ermöglicht Synchronisierung |
|
Geschwindigkeit |
Sehr schnell |
Mäßig schnell |
Mäßig schnell |
|
Tragfähigkeit |
Hoch |
Sehr hoch |
Je nach Geschwindigkeit und gewünschter Positionierung anpassungsfähig |
|
Langlebigkeit |
Mäßig |
Hoch |
Hoch |
|
Beschleunigung |
Sehr hoch |
Sehr hoch |
Mäßig |
|
Widerständsfähigkeit bei Erschütterungen |
Widerstandsfähig |
Explosionssicher, stoßsicher und funkensicher |
Begrenzte Widerstandsfähigkeit gegen Laststöße |
|
Umgebungsbeeinflussung |
Hoher Lärmpegel |
Behandlung und Leckage von Hydraulikflüssigkeiten |
Minimale Auswirkungen |
|
Zusätzliche Komponenten |
Kompressor, Leitungen, Strom |
Pumpe, Leitungen, Strom |
Strom |
|
Wirkungsgrad |
Niedrig |
Niedrig |
Hoch |
|
Verlässlichkeit |
Ausgezeichnet |
Gut |
Gut |
|
Wartung |
Hoch |
Hoch |
Fast nicht vorhanden |
|
Anschaffungskosten |
Niedrig |
Hoch |
Hoch |
|
Betriebskosten |
Mäßig |
Hoch |
Niedrig |
|
Instandhaltungskosten |
Niedrig |
Hoch |
Niedrig |
|
|
Kapitel 3: Bestandteile eines elektrischen Linearzylinders |
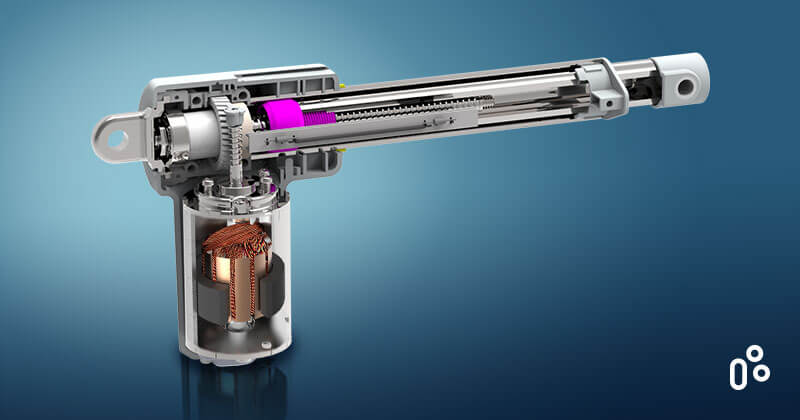
Es gibt eine Vielzahl von Elektrozylindern in verschiedenen Formen, Größen und Kapazitäten. Durch die vertikale Integration entwickelt, fertigt und individualisiert TiMOTION alle internen Komponenten seiner Elektrozylinder entsprechend den Anforderungen seiner Kunden und deren Anwendungen.
Um innovative Automatisierungslösungen für Ihre Anwendungen zu erreichen, ist es wichtig, das Innenleben eines Elektrozylinders und seiner Komponenten zu verstehen.
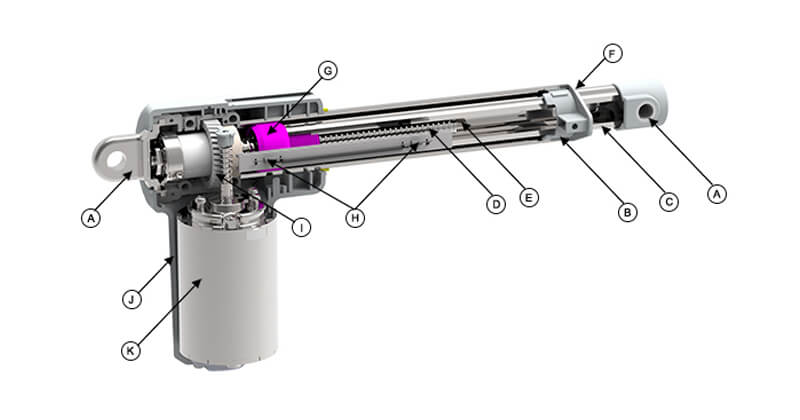
A. Die Befestigung vorne/hinten
Die Befestigung ist ein U-förmiges Metallstück mit Löchern an beiden Enden, durch die ein Stift oder eine Schraube geführt wird. Gabelkopfbefestigungen an der Vorder- und Rückseite des Linearantriebs ermöglichen die Montage an der Anwendung. TiMOTION-Befestigungselemente sind rund, U-förmig (oder geschlitzt) oder mit einem Loch versehen. TiMOTION passt die Gabelköpfe für jede Anwendung individuell an.
B. Das äußere Rohr
Dieses auch als Außenprofil bezeichnete Rohr aus stranggepresstem Aluminium schützt die Außenseite des Antriebs und umfasst alle internen Komponenten des Elektrozylinders.
C. Das Innenrohr
Das Innenrohr, das auch als Verlängerungsrohr, Antriebsrohr, Übertragungsrohr oder Kolben bezeichnet wird, besteht in der Regel aus Aluminium oder rostfreiem Stahl. Im eingefahrenen Zustand umschließt das Innenrohr das Schneckengetriebe. Dieses Rohr ist an einer Gewindemutter befestigt und fährt aus oder ein, wenn sich die Mutter entlang der Schnecke bewegt.
D. Die Schnecke
Die Schnecke, die auch als Leitspindel, Drehspindel oder Hubspindel bezeichnet wird, ist eine lange gerade Stange, die sich in einer Maschine oder einem Werkzeug dreht. Bei ihrer Drehung bewegt sich die Mutter mit und zieht so das Innenrohr aus oder ein, um eine lineare Bewegung zu erreichen.
E. Der Sicherheitsstopp
Der Sicherheitsstopp befindet sich am Ende des Schneckengetriebes und soll ein Überdehnen des Innenrohrs verhindern.
F. Die Dichtung
Die Dichtung ist ein Bestandteil des Linearzylinders, die am Ende des Außenrohrs angebracht ist und verhindert, dass feste und flüssige Verunreinigungen in das Innenrohr gelangen. Sie sorgt für eine gute Abdichtung zwischen dem Innen- und Außenrohr und beeinflusst die Schutzart (IP) des elektrischen Linearantriebs. Die elektrischen Linearantriebe von TiMOTION können in den Schutzarten IP42, IP66, IP68 und IP69K ausgeführt werden.
G. Die Mutter
Die Mutter, entweder eine ACME- oder eine Kugelmutter, ist am Innenrohr befestigt und bewegt sich entlang des Schneckengetriebes, wodurch das Innenrohr aus- oder eingefahren werden kann. Sie kann aus Metall oder Kunststoff bestehen und ist manchmal verkeilt, um ein Verdrehen des Innenrohrs zu verhindern.
H. Endschalter
Die Endschalter steuern die Position des Innenrohrs, wenn es vollständig aus- oder eingefahren ist, indem sie ein Signal senden und/oder den Motor elektrisch abschalten. Diese Schalter verhindern, dass der Elektrozylinder zu weit aus- oder einfährt.
I. Zahnräder
Ein Zahnrad besteht aus Stahl oder Kunststoff und ist mit anderen Zahnrädern gekoppelt, die das Verhältnis zwischen der Geschwindigkeit eines Antriebsmechanismus (z. B. eines Automotors) und der Geschwindigkeit der angetriebenen Teile (der Fahrzeugräder) verändert. Das Getriebe, das direkt mit dem Motor verbunden ist, wird als Antriebsrad bezeichnet. TiMOTION bietet je nach Anwendungsfall unterschiedliche Verzahnungsvarianten (Schnecken- oder Stirnradgetriebe).
J. Das Motorgehäuse
Das Motorgehäuse enthält alle internen Komponenten des Getriebemotors und schützt diese vor Beschädigungen. Das TiMOTION-Motorgehäuse besteht in der Regel aus hochwertigem Kunststoff, außer bei den Industriemodellen, bei denen das Motorgehäuse aus Gussaluminium gefertigt ist.
K. Gleichstrommotor
Der Gleichstrommotor erzeugt die gesamte für den Betrieb des Elektrozylinders erforderliche Energie. Es gibt verschiedene Arten von Gleichstrommotoren, TiMOTION verwendet jedoch Bürstenmotoren, die sich wie folgt zusammensetzen:
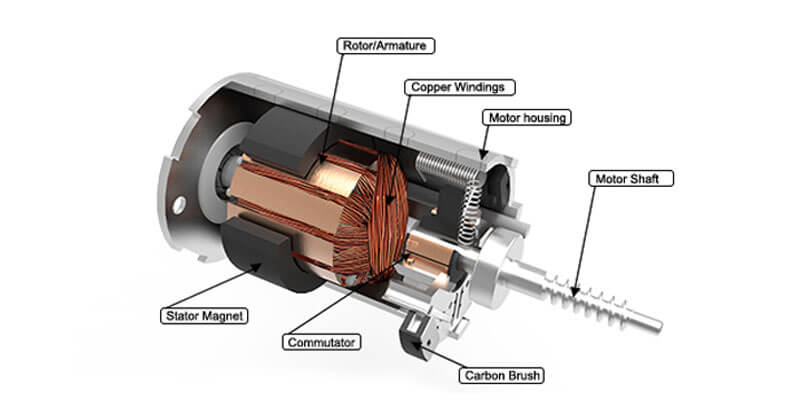
Der Stator
Dieser äußere Teil ist feststehend und besteht aus dem Motorgehäuse, zwei Permanentmagneten und Motorkappen. Der Stator erzeugt ein kontinuierliches Magnetfeld, das den Rotor umgibt.
Der Rotor
Der Rotor, auch Anker genannt, ist der innere Teil des Motors. Dieser Teil ist beweglich (er dreht sich) und besteht hauptsächlich aus einem Silizium Stahlblech, einer Motorwelle, einem Kommutator und Kupferspulen.
Der Schalter
Der Schalter besteht aus einem Paar von Platten, die an der Motorwelle befestigt sind. Diese Platten bieten zwei Anschlüsse für die Magnetspule. Der Schalter dient dazu, die Polarität des Motors umzupolen und ermöglicht es dem Motor, ohne Drehmomentverlust zu laufen.
Kohlebürsten
Kohlebürsten übertragen durch Gleitreibung den elektrischen Strom vom Stator auf den Rotor des Motors.
Die Motorwelle
Die Motorwelle verbindet den Getriebemotor mit dem unteren Teil des Stators.
Hinweis: TiMOTION stellt auch Wechselstrommotoren (AC) her. Dieser Motortyp ist zum Beispiel für den MA1-Industrie-Elektrozylinder erhältlich.
|
|
Kapitel 4: Sicherheitsoptionen für elektrische Linearzylinder |
Wir bei TiMOTION glauben, dass Qualität und Sicherheit Hand in Hand mit Design und Funktionalität gehen. Als vertikal integrierter Hersteller von Elektrozylindern sind wir in der Lage, diese Merkmale auf die Anforderungen unserer Kunden abzustimmen.
Abhängig von der Umgebung, in der ein elektrischer Zylinder eingesetzt wird, und den Belastungen, denen er ausgesetzt ist, ist es wichtig, seine Stabilität und Beständigkeit zu betrachten.
Im Folgenden finden Sie einige Optionen, die Sie bei der Auslegung Ihres Projekts berücksichtigen sollten:
Die mechanische Überlastkupplung
Die mechanische Überlastkupplung ist eine integrierte Vorrichtung, die einrastet, wenn der Elektrozylinder eine vordefinierte Lastgrenze erreicht. Die mechanische Überlastkupplung verbindet und trennt dann den Motor vom Antriebsrad und schützt den Elektrozylinder vor möglichen Schäden durch Überlast.
Der PTC-Widerstand
Der PTC-Widerstand (Positiver Temperaturkoeffizient) wirkt im Wesentlichen wie eine Sicherung, die die Stromzufuhr zum Motor im Falle einer Überhitzung oder eines Ausfalls unterbricht. Unsere Elektromotoren können optional eine UL-Zertifizierung einschließlich eines PTC-Widerstands erhalten.
Seit mehr als einem Jahrhundert ist Underwriter Laboratories (UL) international führend im Bereich Produktsicherheit und nationale Sicherheits- und Konformitätszertifizierungen. TiMOTION stellt sicher, dass die Produkte die entsprechenden externen Tests bestehen, um sich für die UL-Zertifizierung zu qualifizieren.
Die Sicherheitsmutter
Die Sicherheitsmutter ist eine metallverstärkte ACME-Antriebsmutter, die die Last im Falle eines Bruchs oder Versagens der Hauptmutter stützt. Sie wird zum Beispiel für Lasten über 6000 N empfohlen. TiMOTION-Elektrozylinder können mit dieser Option ausgestattet werden, um noch mehr Stärke und Zuverlässigkeit zu erreichen.
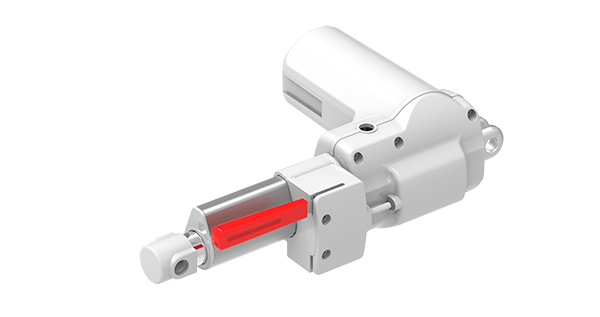
Die Push-Only-Funktion
Eine Standard-Antriebsmutter hat ein Gewinde, das es ermöglicht, sie auf das Innenrohr zu schrauben, im Gegensatz zu einer "Push-only"-Mutter. Die "Push-only"-Funktion verhindert, dass ein Fremdkörper eingeklemmt oder gequetscht wird, und schützt so das Gerät und seine elektrischen Bestandteile vor Sachschäden, die durch ein erzwungenes Zurückziehen verursacht werden könnten.
Diese Funktion ist besonders nützlich für Stühle mit einer Beinauflage. Wenn ein Gegenstand versehentlich unter die Beinstütze gelangt, wird dieser nicht zerdrückt, wenn er berührt wird.
Elektrische Linearantriebe, die speziell für Komfort- oder medizinische Geräte entwickelt wurden, verfügen über diese Option: TA5P, TA6, TA14, TA31, TA38M, TA16, TA23, TA42, TA43.
Der Mechanischer Schnellspanner
Der mechanische Schnellspanner besteht aus einem Griff oder einem Kabel, das die manuelle Entriegelung des Stellantriebs für eine Notabflachung ermöglicht. Diese Funktion wird insbesondere bei medizinischen Anwendungen wie Krankenhausbetten verwendet, damit die Rückenlehne im Falle einer Herz-Lungen-Wiederbelebung (HLW) schnell zurückgestellt werden kann.
Die folgenden zertifizierten und im medizinischen Bereich einsetzbaren Linearantriebe, bieten diese Option: TA31QR, TA15.
Die Manuelle Entriegelung
Durch die manuelle Entriegelung kann das Innenrohr von der vorderen Befestigung (Gabelkopf) gelöst werden und sich frei drehen. Die manuelle Entriegelung ermöglicht es, den Elektrozylinder ohne Motoreingriff einzuziehen und manuell in die Ausgangsposition zurückzukehren. Diese Funktion eignet sich besonders für medizinische Hebesysteme, da sie das manuelle Absenken des Pflegebedürftigen, z. B. im Falle einer medizinischen Notwendigkeit, ermöglicht.
Diese Option ist bei den medizinischen elektrischen Linearantrieben TA23, TA36 und TA37 zu finden.


Die Handkurbel
Die Handkurbel ist eine Sicherheitseinrichtung, die vor allem für den medizinischen Bereich entwickelt wurde. Sie ermöglicht es dem Anwender, die Position eines Bettes manuell zu verstellen, z. B. im Falle eines Notfalls oder Stromausfalls. Diese Option kann je nach Anwendung angepasst werden und ist erhältlich mit dem im medizinischen Bereich einsetzbaren TA10 Elektroantrieb, aber auch bei den MA1 und MA2 Elektroantrieben für spezielle industrielle Anforderungen.

Die Schneckenbremse
Die Schneckenbremse wird um das Schneckenrad gewickelt. Es handelt sich um eine Einwegbremse mit Rücklaufsperre, die automatisch durch die Wicklung aktiviert und dann gelöst wird, wenn sich der Motor in die andere Richtung dreht.
Die Motorbremse
Die Motorbremse wird am oberen oder unteren Ende der Motorwelle angebracht. Die Motorbremse verleiht dem Elektrozylinder zusätzliche Haltbarkeit, indem sie die Selbstsperrfähigkeit des Elektrozylinders verbessert. Die meisten TiMOTION Elektrozylinder sind aus Qualitätsgründen serienmäßig mit der Motorbremse ausgestattet.


Die elektromechanische Bremse
Die elektromechanische Bremse ist an der Unterseite der Motorwelle angebracht. Sie bremst oder stoppt den Motor durch einen mechanischen Widerstand, der durch eine elektromagnetische Kraft auf die Schnecke erzeugt wird. Diese Sicherheitsoption ist für den elektrischen Linearantrieb MA1 verfügbar.
Die mechanische Bremse
Eine mechanische Bremse kann hinzugefügt werden, um die Stabilität des Elektrozylinders zu erhöhen, wenn die reversible Kraft hohe Lasten tragen muss.
Damit ist Kapitel 3 unseres Leitfadens abgeschlossen. Im nächsten Kapitel werden wir die verschiedenen Last- und Geschwindigkeitscharakteristiken erläutern, die für Ihr Antriebsprojekt berücksichtigt und definiert werden müssen.
|
|
Kapitel 5: Last- und Geschwindigkeitsmerkmale eines elektrischen Linearzylinders |
Wenn Sie ein neues Projekt für Ihr Unternehmen entwickeln, gibt es viele Merkmale zu berücksichtigen, um die ideale elektrische Linearbewegungslösung für Ihre Anwendung zu wählen.
Durch die Anpassung verschiedener Parameter wie Schneckengetriebecharakteristik, Motordrehzahl, Getriebeübersetzung und elektrische Antriebsdrehzahl konstruiert TiMOTION einen elektrischen Antrieb mit Last- und Geschwindigkeitsfähigkeiten, die Ihren Anforderungen entsprechen.
Die verschiedenen Arten von Schnecken
Der gewählte Schneckentyp bestimmt zum Teil die Geschwindigkeit des Elektrozylinders und seine Tragfähigkeit. TiMOTION produziert elektrische Linearzylinder mit Gewinde- oder Kugelumlaufspindel. Es gibt drei Arten von Steigungen bei Gewindeschrauben: Vierkantsteigung, ACME-Steigung oder Sägezahnsteigung.
Die Gewindeschnecke
TiMOTION stellt eine Gewindeschraube mit einer ACME-Steigung her (kompatibel mit einer ACME-Mutter). Die ACME-Gewindesteigung bietet eine hohe Tragfähigkeit, ist aber aufgrund der erhöhten Reibung zwischen Mutter und Gewinde nicht so schnell wie eine Kugelumlaufspindel. Sie ist bei allen TiMOTION Elektrozylindern zu finden, zum Beispiel bei folgenden Antrieben: TA2, TA4, TA6, TA23.
Die Kugelumlaufspindel
Die andere Art von Spindel, die in unseren elektrischen Linearantrieben verwendet wird, ist die Kugelumlaufspindel. Dies ist bei dem MA1 der Fall. Die Kugelgewindespindel erzeugt weniger Reibung als die ACME-Schraube, da die Welle eine kreisförmige Bahn bietet, in der die Kugeln in der Mutter leichter gleiten können als bei einem ACME-System. Dadurch können mit dem Kugelgewinde höhere Geschwindigkeiten erreicht. Andererseits ist der Kugelmechanismus nicht unumkehrbar und erfordert eine mechanische Bremse, damit der Zylinder mit einer Last eingefahren und in einer bestimmten Position gehalten werden kann.
Spezifikationen
Die Eigenschaften des Schneckengetriebes haben auch einen wichtigen Einfluss auf die Geschwindigkeit des Elektrozylinders, vor allem aber auf die Last, die getragen werden kann. Die Eigenschaften der Schnecke hängen von der Schneckensteigung, der Gesamtschneckensteigung und der Anzahl der Gänge ab.
Die Spindelsteigung ist der axiale Abstand zwischen dem Scheitelpunkt der einen Steigung und dem der benachbarten Steigung. Die Gesamtsteigung ist der lineare Weg, den die Mutter zurücklegt, wenn sie eine vollständige Umdrehung auf der Schraube ausgeführt hat. Der Anfang ist die Anzahl der Schritte, die um die Schraube gewickelt werden.
Drehgeschwindigkeit (RPM) und Getriebeübersetzung
Ein weiteres Element, das die Geschwindigkeit und Belastbarkeit eines Elektrozylinders bestimmt, ist die Geschwindigkeitseinstellung und das Übersetzungsverhältnis des Getriebes.
Das Übersetzungsverhältnis ist das Verhältnis der Umdrehungen pro Minute (U/min) des Antriebsrades zur U/min des angetriebenen Rades. Wenn z. B. das Antriebszahnrad eines Stirnrads 12 Zähne hat und das Abtriebszahnrad 24 Zähne, dann ist das Abtriebszahnrad doppelt so groß wie das Antriebszahnrad. Das Antriebszahnrad muss sich dann zweimal drehen, um eine Umdrehung des angetriebenen Zahnrads zu machen, so dass das Übersetzungsverhältnis 2:1 beträgt.
Je nach dem Verhältnis zwischen Kraft und Geschwindigkeit, das erforderlich ist, können zusätzliche Gänge in die Gleichung aufgenommen werden. Bei einem linearen elektrischen Zylinder sind Kraft und Geschwindigkeit durch die folgende Formel verknüpft: Mechanische Leistung = Kraft x Geschwindigkeit.
Was bedeutet das für uns? Angenommen, Ihre Anwendung erfordert eine besonders hohe Tragfähigkeit. In diesem Fall kann TiMOTION weitere Zahnräder hinzufügen und das Übersetzungsverhältnis anpassen, um ein höheres Drehmoment im Mechanismus zu erzeugen, wodurch letztlich mehr Kraft auf das Schneckengetriebe ausgeübt und somit die Last bewegt werden kann.
Die erforderliche mechanische Leistung
Bei der Festlegung der Geschwindigkeit und der Tragfähigkeit eines Elektrozylinders kann man auch die für den Betrieb der Anwendung erforderliche mechanische Leistung berücksichtigen. Diese Leistung wird in Watt gemessen. Die wichtigste Information, die man sich über Strom, Geschwindigkeit und Last von Gleichstrommotoren merken sollte, ist, dass mit zunehmender Last der Strom steigt und die Geschwindigkeit tendenziell abnimmt (wie in den obigen Diagrammen dargestellt).
Neben diesem grundsätzlichen Zusammenhang beeinflussen viele weitere elektromechanische Parameter die Last und die Geschwindigkeit, wie z. B. die Art der verwendeten Stromversorgung oder die Leistung des Motors. Bei der Herstellung eines Elektrozylinders untersucht TiMOTION jeden dieser Parameter, um die beste Lösung für die Anwendungen seiner Kunden zu finden.
TiMOTION stellt elektrische Transformatoren her, die mit unseren 12V DC, 24V DC und 36V DC elektrischen Linearantrieben kompatibel sind. Da die meisten TiMOTION-Zylinder mit Gleichstrom (DC) betrieben werden, können unsere Steuerboxen Wechselstrom (AC) in Gleichstrom (DC) umwandeln, so dass die Kunden ihre Anwendungen an die Steckdose anschließen können.
TiMOTION kann auch ein Schaltnetzteil (SMPS) oder einen Ringkerntransformator in die Steuerbox integrieren. SMPS-Transformatoren unterstützen sowohl 110V AC- als auch 220V AC-Steckdosen, so dass unsere Kunden ihre Produkte an verschiedene Steckdosen weltweit anschließen können.
Nachstehend finden Sie eine Übersichtstabelle der Begriffe und Umrechnungen. Die erste ist für die Spannungseigenschaften, die zweite für die Umrechnung von Newton (N) in Pfund (Lbs) und Kilogramm (Kg) und die dritte für die Umrechnung von Millimetern (mm) in Zoll (IP).
Ausdrücke der Spannung
|
12 Volt DC |
12V DC |
12 VDC |
|
24 Volt DC |
24V DC |
24 VDC |
|
36 Volt DC |
36V DC |
36 VDC |
|
48 Volt DC |
48V DC |
48 VDC |
|
110 Volt AC |
110V AC |
110 VAC |
|
220 Volt AC |
220V AC |
220 VAC |
Gewichtsumrechnung (N - Lbs - kg)
|
1 Newton (N) |
.22481 Pfund (Lbs) |
|
1 Newton (N) |
.1 Kilogramm (kg) |
Abstand (mm - in)
|
1 Millimeter (mm) |
.03937 Zoll |
|
|
Kapitel 6: IP-Schutzarten |
Die Lebensdauer eines elektrischen Linearantriebs hängt nicht nur von den internen Komponenten (Schnecken, Muttern, ...) ab, aus denen er besteht, sondern ist auch abhängig von seiner Schutzklasse gegen feste oder flüssige Verunreinigungen, die in das Innere der Mechanismen gelangen können. TiMOTION garantiert ein hohes Maß an Schutz für seine Produkte, indem die äußeren Komponenten mit einer Schutzdichtung versehen werden.
Was ist eine IP-Einstufung?
Je nach der Umgebung, in der die Anwendung stattfindet, passen wir das Schutzniveau unserer Produkte an Ihre Bedürfnisse an. Dieses Niveau wird auf der Grundlage des Schutzindexes (PI) berechnet. Die IP besteht in der Regel aus zwei Zahlen, die den Schutzgrad eines Geräts angeben.
Wie liest man eine IP-Einstufung?
Die erste Zahl gibt den Grad des Schutzes gegen das Eindringen von festen Verunreinigungen wie Schutt oder Staub in das Gerät an. Er reicht von 0 (kein Schutz) bis 6 (hoher Schutz gegen Staub).
Die zweite Zahl gibt den Grad des Schutzes gegen das Eindringen von flüssigen Verunreinigungen in das Gerät an, z. B. Wasser. Er reicht von 0 (kein Schutz) bis 8 (hoher Schutz gegen flüssige Stoffe).
IP erhöht die Lebensdauer der Geräte und erfüllt die Sicherheitsstandards für die Nutzer. TiMOTION unterzieht alle seine fertigen Produkte vor der Markteinführung strengen Tests, die über die realen Einsatzbedingungen hinausgehen, um die Qualität und Haltbarkeit seiner Produkte zu gewährleisten.
Die elektrischen Linearantriebe können entsprechend der gewünschten IP-Schutzart angepasst werden. Die gängigsten sind: IP42, IP54, IP66 und IP69K.
IP42
Die Schutzart IP42 gilt im Allgemeinen für Geräte in Innenräumen, wo Staub und Wasser keine nennenswerte Gefahr darstellen. Sie findet sich zum Beispiel an Fernsehliften, Sofas, Sesseln oder verstellbaren Betten. Es ist die ideale IP für Komfortgeräte. Beispiele für elektrische Zylinder und Säulen mit diesem IP sind TVL3, TA5P, TA6 und TA14.
IP54
Die Schutzart IP54 ist universeller, da sie ein höheres Schutzniveau bietet, das den Betrieb des Elektrozylinders in einer exponierteren Umgebung wie einem Krankenhaus, einer Zahnarztpraxis oder einem Lager ermöglicht. Dieser Wert ist als Option für elektrische Zylinder wie TA4 und TA23 erhältlich.
IP66
Die Schutzart IP66 ist eine unserer höchsten Schutzstufen gegen feste und flüssige Verunreinigungen. Es ist vollständig gegen das Eindringen von Staub und Hochdruckwasserstrahlen geschützt. Das bedeutet, dass sie in besonders rauen Außenumgebungen wie Baustellen oder landwirtschaftlichen Betrieben eingesetzt werden können. Die Schutzart IP66 kann auch für medizinische Geräte interessant sein, die zur Einhaltung strenger Hygienestandards eine intensive Pflege mit Reinigungsmitteln erfordern (medizinische Betten, Patientenlifter). IP66 ist als Option für die folgenden elektrischen Linearantriebe erhältlich: TA16, TA23 und TA31.
IP67 und 68
Die Inline-Elektrozylinder JP3 und JP4 können optional mit der Schutzart IP67 oder IP68 ausgestattet werden. Dies sind die höchsten Schutzstufen gegen flüssige Bestandteile, was bedeutet, dass das Gerät vollständig versiegelt ist. Dank der Schutzart IP67 kann das Gerät 30 Minuten lang bis zu einem Meter tief in Flüssigkeiten eingetaucht werden. Die Schutzart IP68 erlaubt es, das Gerät eine Stunde lang in eine Flüssigkeit in einer Tiefe von mehr als einem Meter einzutauchen. Dieses Schutzniveau wird vor allem bei industriellen Anwendungen wie Schlössern, Ventilen und anderen Anwendungen mit direktem Kontakt zu Wasser geschätzt. Bitte beachten Sie, dass nur IP67 und IP68 das Eintauchen in Wasser erlauben.
IP69K
Für bestimmte Anwendungen bieten wir auch die Schutzart IP69K an. Die Schutzart IP69K gilt als die höchste Stufe auf dem Industriemarkt und ermöglicht es, dass die Geräte einer Reinigung mit hohem Druck und hohen Temperaturen standhalten. Bitte beachten Sie, dass ein Gerät mit der Schutzart IP69K nicht in Wasser getaucht werden kann. Elektrische Linearantriebe mit IP69K eignen sich besonders für den Einsatz in landwirtschaftlichen Umgebungen, in denen ein hohes Maß an Staub, Schmutz und Chemikalien vorhanden ist. Diese Option wird häufig bei unseren elektrischen Industriezylindern MA1, MA2, MA5, JP3 und JP4 eingesetzt.
Um mehr über den Schutzindex zu erfahren, klicken Sie hier!
|
|
Kapitel 7: Elektrische Linearantriebe und Positionssensoren |
Die Auswahl des richtigen elektrischen Linearantriebssystems für Ihre Anwendung ist ein Prozess, den Sie vor dem Kauf sorgfältig abwägen sollten. TiMOTION bietet viele Anpassungsmöglichkeiten und einen erstklassigen Kundenservice, um Ihnen zu helfen, die ideale Lösung zu finden.
Bevor Sie sich für ein bestimmtes Modell entscheiden, ist es wichtig, die Komponenten eines elektrischen Linearantriebs kennenzulernen. Hier werden wir uns auf die verschiedenen Positionssensoren konzentrieren.
Wenn sie mit Positionssensoren ausgestattet sind, können Elektrozylinder die Position ihres Hubs an die Steuerung übermitteln. Tatsächlich werden sie effizienter.
Obwohl sie nicht systematisch sind, sind Positionssensoren immer noch unerlässlich und für die komplexesten Systeme sehr zu empfehlen. Bei synchronisierten Bewegungen werden diese Sensoren unentbehrlich, um eine reibungslose Bewegung zu gewährleisten, unabhängig von den Unterschieden in der getragenen Last.
Darüber hinaus sind diese Sensoren entscheidend für andere Funktionalitäten, die die Position des Zylinderhubs kennen müssen. Das Positionsgedächtnis veranschaulicht dies perfekt.
Die 4 wichtigsten Positionssensoren, die TiMOTION in seinen Systemen verwendet, sind :
- Hall-Effekt-Sensoren
- Potentiometer
- Reed-Sensoren
- Optische Sensoren
Hall-Effekt-Sensoren
TiMOTION empfiehlt die Verwendung von Hall-Effekt-Sensoren, da diese klein genug sind, um in die kompaktesten Systeme zu passen, und gleichzeitig ein hochpräzises digitales Signal liefern, das auf der Motorwelle platziert wird.
Diese Sensoren werden durch ein Magnetfeld aktiviert, das zwei wesentliche Eigenschaften aufweist: Flussdichte und Polarität.
Das von den Hall-Effekt-Sensoren abgegebene Ausgangssignal ist relativ zur Dichte des Magnetfelds um das System herum. Wenn dieses Magnetfeld einen bestimmten vorgegebenen Schwellenwert überschreitet, wird es detektiert und erzeugt eine Spannung, die als Hallspannung bezeichnet wird.
Kostengünstig, qualitativ hochwertig und mit einer langen Lebensdauer sind Hallsensoren die am häufigsten verwendeten.
HINWEIS: Die TiMOTION Controlboxen sind nur für den Empfang von Informationen ausgelegt, die von Hall-Effekt-Sensoren gesendet werden. Sie unterstützen kein Feedback von anderen Arten von Sensoren (oder nur nach Untersuchung der Anfrage).
Potentiometer
Potentiometer, auch als POT bekannt, sind in der Industrie weit verbreitet. Es handelt sich um eine Art variabler Widerstand mit drei Anschlüssen, von denen einer mit einem Schieber verbunden ist, der sich auf einer Widerstandsbahn mit den beiden anderen Anschlüssen an den Enden bewegt. Dieses System ermöglicht es, eine Spannung zwischen der mit dem Schieber verbundenen Klemme und einer der beiden anderen Klemmen zu sammeln, abhängig von der Position des Schiebers und der Spannung, der der Widerstand ausgesetzt ist.
Mit anderen Worten: Der Widerstand bestimmt die Position. Wenn sich die Schnecke dreht, ändert sich der Widerstandswert und jeder Widerstandswert entspricht einer Position des Zylinderhubs.
Gegenüber Hall-Effekt-Sensoren haben Potentiometer den Vorteil, dass die Hubposition auch bei einem Stromausfall des Systems beibehalten wird.
Potentiometer haben jedoch den Nachteil, dass sie weniger genau sind als Hall-Effekt-Sensoren, da sie ein analoges Signal senden und dem Joule-Effekt unterliegen. Dies ist jedoch nicht nachteilig für die Lesbarkeit der Gesamtposition.
Reedsensoren
Reedsensoren sind magnetische Sensoren. Sie haben einen elektrischen Schalter, der durch ein Magnetfeld aktiviert wird. Der Sensor ist ein Schalter, der ein Kontaktpaar enthält, das auf Eisenmetallmessern montiert ist, die sich in einem abgedichteten Glasgehäuse befinden. Die Kontakte können geöffnet und geschlossen werden, wenn ein Magnetfeld vorhanden ist, und umgekehrt. Der Schalter kann durch eine Spule betätigt werden, wodurch der Reedschalter in seine ursprüngliche Position zurückkehrt. Mit der Kraft jeder Umdrehung der Schnecke und der Position der Hublänge des Elektrozylinders öffnet oder schließt sich der Reedschalter.
TiMOTION verwendet speziell diesen Sensortyp innerhalb der Steuerung mit einer Sicherheitstastenfunktion. Daher ist das System so programmiert, dass es ein Signal sendet, wenn der Schlüssel entfernt wurde. Dieser Sensortyp kann bei einigen Zylindern auch direkt auf dem Außenrohr angebracht werden. Auf diese Weise wird die Länge des Hubs leicht einstellbar.
Optische Sensoren
Optische Sensoren werden gelegentlich in TiMOTION Elektrozylindern eingesetzt. Dieser Sensortyp wandelt Licht in ein elektronisches Signal um. Wenn sich eine Schnecke dreht, dreht sich auch ein Lichtblockierrad, das das Licht zum Optokoppler blockiert. Dieser Optokoppler sendet ein Signal, sobald er feststellt, dass das Licht blockiert ist.
Schlussfolgerung
Wir hoffen, dass dieser Leitfaden Ihnen geholfen hat, die Komponenten und Funktionen eines elektrischen Linearantriebs besser zu verstehen und um Ihnen zu zeigen, wie er in elektrischen Antriebssystemen integriert wird und arbeitet. TiMOTION stellt seit über 15 Jahren elektrische Linearantriebe her. Unsere vertikale Integration ermöglicht es uns, unsere Produkte auf die spezifischen Anforderungen unserer Kunden abzustimmen.
Wir wissen, dass die richtige Technologie die meisten Probleme lösen kann und dass elektrische Linearantriebe in vielen Anwendungen nach und nach hydraulische und pneumatische Systeme ersetzen.
TiMOTION nutzt sein Fachwissen, um qualitativ hochwertige, individuell anpassbare Komponenten zu liefern. Für weitere Informationen besuchen Sie bitte unsere Website oder wenden Sie sich an ein lokales Verkaufsbüro.
Zugehörige Artikel

Warum TiMOTION der ideale Partner für Ihre Automatisierungsprojekte ist

Kapitel 2: Grundlage von Aufbau eines elektrischen Linearmotors

Kapitel 1: Elektrische Linearmotoren: Definition, Funktionsweise und Typen
Was sind Aktuatoren? Beispiele unterschiedlicher Aktuatoren

Wasserdichte 12V Linearantriebe mit IP54 bis IP69K Schutz

Linearantriebe 12V: Effiziente Lösungen von 1000N bis 10000N

TiMOTION-Kompakt-Linearantriebe: Anwendungen und Modelle
Kapitel 5: IP-Schutzarten und Schmierung von Elektrozylindern

Wie wählt man einen elektrischen Linearantrieb aus?
