2020/06/17
TiMOTION Europe 與 IMT 阿萊斯礦業學院合作創新專案!
新聞和文章

感謝位於法國南部加爾的 IMT 阿萊斯礦業學院提供機會,讓我們協助他們的大四工程系學生完成機電整合機器人設計專案。
學生挑戰
此學生專案是以法國替代能源與原子能委員會 (CEA) 的一份摘要為基礎。CEA 的需求是開發勘測人類無法到達或危險之放射學和物理化學區域的機器人,尤其是在拆除核設施方面。他們要求學生設計出可以越過台階、洞或樓梯等各種障礙物的可移動原型。
工程系的學生在大四期間開發出原型,從專案啟動到程式設計、機械和電氣設計,再到設備研發-於六個月內完成所有的工作,同時需要上課和準備考試,預算僅有 4000 美元。專案團隊必須向 CEA 以及由工業家和教師組成的評審團展示機器人。
專案負責人 Clément Thomaso 提出了他的觀點:「雖然是學校專案,卻能引導我們擺脫通常圍繞此類研究的學術體系,採用專業態度回應 CEA 發出的摘要。」
別再等待了...瞭解四足機器人專案!
勘測機器人是應用於掃描目標空間,包含必須放置的設備或必須控制的表面(地板或牆壁)。
這些機器人必須能滿足操作需求,以及可以在由人類為人類創造的環境中移動。它們必須能越過台階、洞或樓梯。
學生與教師合作,並選擇設計-四足機器人。現在,經常可以看見此類機器的示範:最著名的是 Boston Dynamics 的「Spot」和 MIT 的「Cheetah」。
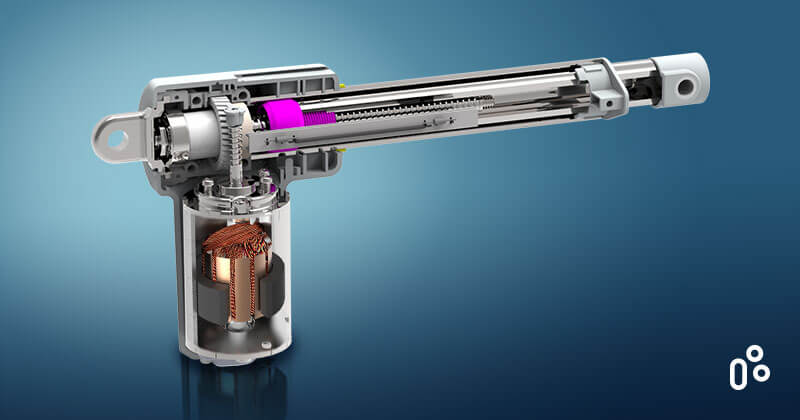
電動推桿:機器人解決方案
該團隊選擇使用四個推桿做為機器人的腳。選擇 MA2 電動推桿是因為它是一種極度靈活的設備,且具有輕量化特性、推力和最佳的速度。配備霍爾感測器和大腦的機器人可以行走和移動,主要的關鍵是採用內建具有高精確度之電位計的MA2 電動推桿,控制移動和記憶化系統位置。IP69 防護等級則可滿足高壓水柱去汙的極端要求。
專案負責人 Clément Thomaso 表示:
「TiMOTION 提供四個 MA2 電動推桿,為我們提供極大的幫助。缺少這一份禮物,我們將無法控制在預算內,而必須做出選擇...TiMOTION 團隊的參與,對我們的期末專案非常有幫助。
製造 MA2 的高品質材料,讓我們能加強抓地力,確保機器人的耐用性。在美學方面,平行馬達對我們來說是一項優勢,90° 馬達可以大幅增加機器人的寬度。」
透過協作方法誕生四足機器人
POPI 誕生了!Clément Thomaso 表示:「相互挑戰及合作,讓我們更進步!」
探索 POPI:

原型的前景看好...
我們希望 POPI 能為對此專案感興趣的人創造一個社群,並成為教育或研究用途的人性化協作平台。您可以在此處找到所有的資訊:https://github.com/popi-mkx3/popi_project
此專案最初是從大學專案開始,但是該團隊正在尋找更多的合作夥伴,以推出新版本。
相關文章

為何TiMOTION(第一傳動)是您自動化專案的理想合作夥伴

第2部:電動線性推桿的關鍵組件

第1部:什麼是電動線性推桿?定義與類型解析
概述 - 致動器基本知識一次搞懂

IP54到IP69K防水線性推桿

TiMOTION的各式12V電動線性推桿:從負載1,000N到10,000N

TiMOTION(第一傳動)精巧型電動直線推桿:應用及型號
第5部:電動推桿的IP等級和潤滑

10個使用客製化電動推桿的優點
