2020/06/17
TiMOTION Europe And The IMT Mines d'Ales School, A Cooperation For An Innovative Project!
Nieuws/Artikelen

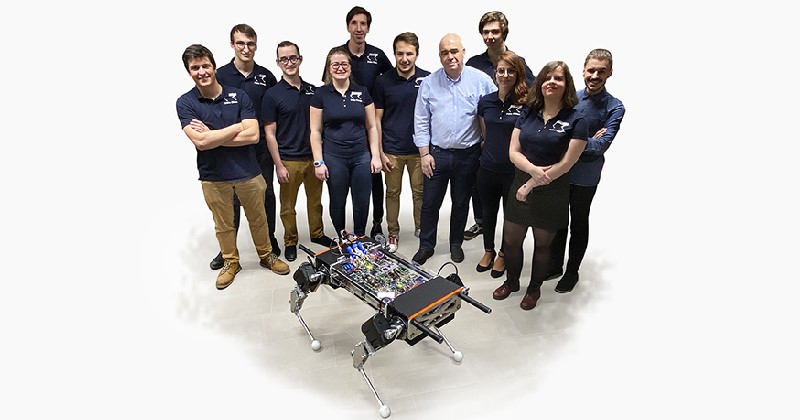
We are thankful to the IMT Mines d'Alès school in Gard, South of France, for the opportunity they have given us to support their senior engineering students in their mechatronics robot design project.
The Students Challenge
The students' project was based on a specific brief from the French Alternative Energies and Atomic Energy Commission (CEA). The CEA’s need was to develop robots that can map radiological and physiochemical areas that are inaccessible or dangerous to humans, particularly in regards to nuclear dismantling. It was requested of the students to design a mobile prototype that was able to cross a variety of obstacles such as steps, holes, or stairs.
Engineering students spent their senior year developing the prototype from project inception to programming, mechanical and electrical design, to equipment research and development – doing everything from A to Z in six months while taking courses and exams with only a 4000 USD budget. The project team had to demo a robot to the CEA and a jury featuring both industrialists and teachers.
The project leader, Clément Thomaso, gave us his point of view: "Although this is a school project, we were led to move away from the academic system that often surrounds this type of work and adopts a professional status by responding to the brief issued by the CEA.” »
Don't wait any longer... Find out about the quadruped robot project!
Mapping robots are used to scan rooms of interest that contain equipment that needs to be deposited or surfaces (floors or walls) that need to be controlled.
These robots must respond to operational needs and be able to move in an environment created by and for man. They must then cross-steps, holes, or stairs.
The students collaborated with teachers and selected a design – a quadruped robot. It is now common to see demonstrations of this type of machine: the most famous being the Boston Dynamics “Spot” and the MIT “Cheetah”.
Electric Actuators: A solution for robots
The team chose to use four actuators for the legs of the robot. The MA2 electric actuator was chosen as it is a highly flexible piece of equipment with reduced weight, a thrust force, and an optimal speed. Equipped with hall sensors and a brain, the robot walks, and moves. The potentiometer integrated into the MA2 electric actuator has high precision - a key aspect in controlling movements and memorized system positions. The IP69 protection rating meets extreme requirements for decontamination with high-pressure water jets.
A few words from Clément Thomaso, project leader:
"TiMOTION really helped us by offering us four MA2 electric actuators. Without this gift, we would not have been able to stay within our budget and we would have had to make choices... The TiMOTION team were very helpful in participating in our final project exam.
The high-quality materials used to make the MA2 allows us to tighten and reinforce its grip, guaranteeing the durability of our robot. The parallel motor was aesthetically an advantage for us, whereas a 90° motor would have greatly increased the width of our robot.” »
The quadruped robot is born through a collaborative approach
POPI is born! "It is by challenging each other and working together that we make progress!” says Clément Thomaso.
Discover POPI:

The prototype has a future...
We hope POPI will create a community of people interested in the project, and become a user-friendly collaborative platform for educational or research purposes. You will find all of the information here: https://github.com/popi-mkx3/popi_project
This project initially started as a university project, but the team is looking for additional partnerships to get the new version up and running.
TiMOTION
Gerelateerde Artikelen

Deel 1: Wat is een elektrische lineaire actuator en hoe kiest u deze?

Deel 9: Inleiding - De belangrijkste feiten over actuatoren

IP54 tot IP69K waterdichte lineaire actuatoren

12V lineaire actuatoren: vermogen van 1000 N tot 10000 N

TiMOTION Compact Linear Actuators: Applications and Models

Hoofdstuk 5: IP-beschermings- en smeerwaarden

How To Choose An Electric Linear Actuator?

Hoofdstuk 3: Veiligheidsopties voor elektrische lineaire actuatoren

The Ultimate Guide to Actuators
