2022/01/02
Kapitel 2: Bestandteile eines elektrischen Linearzylinders
Nachrichten / Artikel
Willkommen zum zweiten Kapitel unseres Leitfadens über elektrische Linearantriebe und was Sie beim Kauf eines elektrischen Antriebssystems beachten sollten.
TiMOTION stellt seit über 15 Jahren elektrische Linearantriebe und verwandte Technologien her. Wir bieten schlüsselfertige Komplettlösungen und ein hohes Maß an kundenorientierte Anpassungsmöglichkeiten, um ihre spezifischen Anforderungen an Ihre Anwendung zu erfüllen.
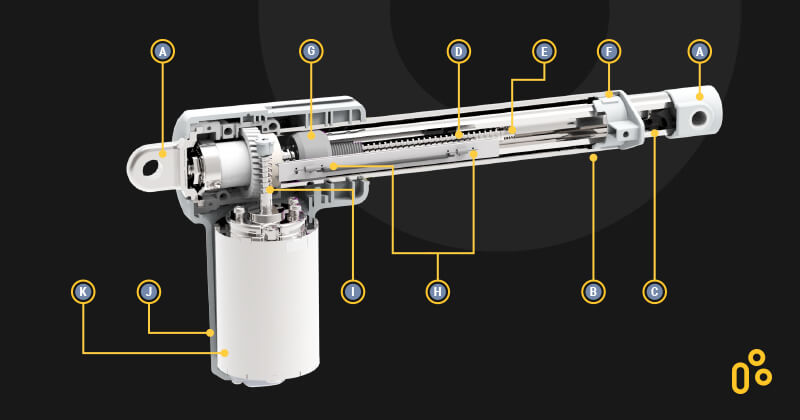
Um die Funktionsweise eines linearen Antriebssystems besser zu verstehen, empfehlen wir Ihnen, sich die Elemente eines Elektrozylinders anzuschauen.
A. Die Befestigung vorne/hinten
Die Befestigung ist ein U-förmiges Metallstück mit Löchern an beiden Enden, durch die ein Stift oder eine Schraube geführt wird. Gabelkopfbefestigungen an der Vorder- und Rückseite des Linearantriebs ermöglichen die Montage an der Anwendung. TiMOTION-Befestigungselemente sind rund, U-förmig (oder geschlitzt) oder mit einem Loch versehen. TiMOTION passt die Gabelköpfe für jede Anwendung individuell an.
B.Das äußere Rohr
Dieses auch als Außenprofil bezeichnete Rohr aus stranggepresstem Aluminium schützt die Außenseite des Antriebs und umfasst alle internen Komponenten des Elektrozylinders.
C. Das Innenrohr
Das Innenrohr, das auch als Verlängerungsrohr, Antriebsrohr, Übertragungsrohr oder Kolben bezeichnet wird, besteht in der Regel aus Aluminium oder rostfreiem Stahl. Im eingefahrenen Zustand umschließt das Innenrohr das Schneckengetriebe. Dieses Rohr ist an einer Gewindemutter befestigt und fährt aus oder ein, wenn sich die Mutter entlang der Schnecke bewegt.
D. Die Schnecke
Die Schnecke, die auch als Leitspindel, Drehspindel oder Hubspindel bezeichnet wird, ist eine lange gerade Stange, die sich in einer Maschine oder einem Werkzeug dreht. Bei ihrer Drehung bewegt sich die Mutter mit und zieht so das Innenrohr aus oder ein, um eine lineare Bewegung zu erreichen.
E. Der Sicherheitsstopp
Der Sicherheitsstopp befindet sich am Ende des Schneckengetriebes und soll ein Überdehnen des Innenrohrs verhindern.
F. Die Dichtung
Die Dichtung ist ein Bestandteil des Linearzylinders, die am Ende des Außenrohrs angebracht ist und verhindert, dass feste und flüssige Verunreinigungen in das Innenrohr gelangen. Sie sorgt für eine gute Abdichtung zwischen dem Innen- und Außenrohr und beeinflusst die Schutzart (IP) des elektrischen Linearantriebs. Die elektrischen Linearantriebe von TiMOTION können in den Schutzarten IP42, IP66, IP68 und IP69K ausgeführt werden.
G. Die Mutter
Die Mutter, entweder eine ACME- oder eine Kugelmutter, ist am Innenrohr befestigt und bewegt sich entlang des Schneckengetriebes, wodurch das Innenrohr aus- oder eingefahren werden kann. Sie kann aus Metall oder Kunststoff bestehen und ist manchmal verkeilt, um ein Verdrehen des Innenrohrs zu verhindern.
H. Endschalter
Die Endschalter steuern die Position des Innenrohrs, wenn es vollständig aus- oder eingefahren ist, indem sie ein Signal senden und/oder den Motor elektrisch abschalten. Diese Schalter verhindern, dass der Elektrozylinder zu weit aus- oder einfährt.
I. Zahnräder
Ein Zahnrad besteht aus Stahl oder Kunststoff und ist mit anderen Zahnrädern gekoppelt, die das Verhältnis zwischen der Geschwindigkeit eines Antriebsmechanismus (z. B. eines Automotors) und der Geschwindigkeit der angetriebenen Teile (der Fahrzeugräder) verändert. Das Getriebe, das direkt mit dem Motor verbunden ist, wird als Antriebsrad bezeichnet. TiMOTION bietet je nach Anwendungsfall unterschiedliche Verzahnungsvarianten (Schnecken- oder Stirnradgetriebe).
J. Das Motorgehäuse
Das Motorgehäuse enthält alle internen Komponenten des Getriebemotors und schützt diese vor Beschädigungen. Das TiMOTION-Motorgehäuse besteht in der Regel aus hochwertigem Kunststoff, außer bei den Industriemodellen, bei denen das Motorgehäuse aus Gussaluminium gefertigt ist.
K. Gleichstrommotor
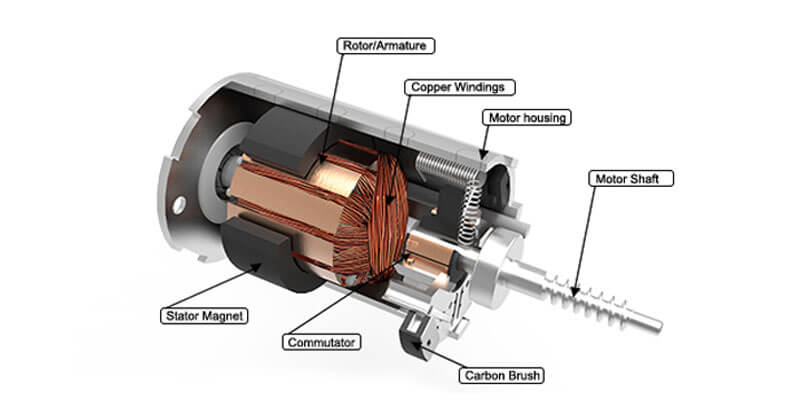
Der Gleichstrommotor erzeugt die gesamte für den Betrieb des Elektrozylinders erforderliche Energie. Es gibt verschiedene Arten von Gleichstrommotoren, TiMOTION verwendet jedoch Bürstenmotoren, die sich wie folgt zusammensetzen:
1. Der Stator
Dieser äußere Teil ist feststehend und besteht aus dem Motorgehäuse, zwei Permanentmagneten und Motorkappen. Der Stator erzeugt ein kontinuierliches Magnetfeld, das den Rotor umgibt.
2. Der Rotor
Der Rotor, auch Anker genannt, ist der innere Teil des Motors. Dieser Teil ist beweglich (er dreht sich) und besteht hauptsächlich aus einem Silizium Stahlblech, einer Motorwelle, einem Kommutator und Kupferspulen.
3. Der Schalter
Der Schalter besteht aus einem Paar von Platten, die an der Motorwelle befestigt sind. Diese Platten bieten zwei Anschlüsse für die Magnetspule. Der Schalter dient dazu, die Polarität des Motors umzupolen und ermöglicht es dem Motor, ohne Drehmomentverlust zu laufen.
4. Kohlebürsten
Kohlebürsten übertragen durch Gleitreibung den elektrischen Strom vom Stator auf den Rotor des Motors.
5. Die Motorwelle
Die Motorwelle verbindet den Getriebemotor mit dem unteren Teil des Stators.
Hinweis: TiMOTION stellt auch Wechselstrommotoren (AC) her. Dieser Motortyp ist zum Beispiel für den MA1-Industrie-Elektrozylinder erhältlich.
6. Endschalter und Positionsrückmeldesensoren
Die Sensoren werden verwendet, um die Position des elektrischen Zylinderhubs an den MCU (Mikrocontroller) zu übermitteln. Elektrische Linearzylinder erfordern in der Regel eine Positionsrückmeldung, wenn die Anwendung hohe Funktionen wie die Synchronisierung mehrerer Geräte oder die Positionsspeicherung erfordert.
Es gibt verschiedene Arten von Sensoren:
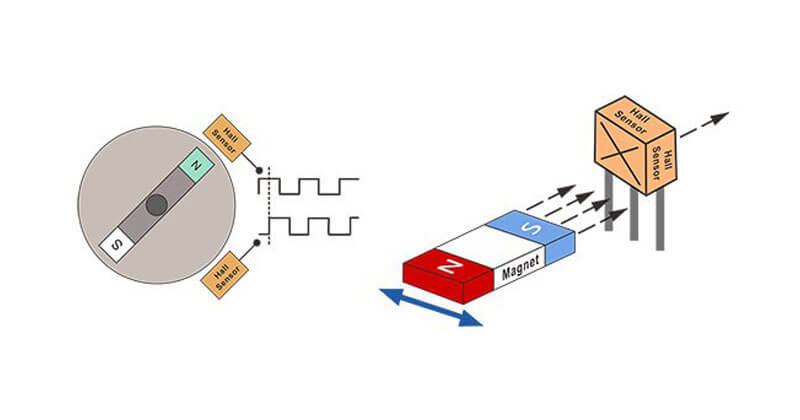
Hall-Sensor
Das Ausgangssignal von Hall-Sensoren hängt mit der Dichte des Magnetfelds um das System herum zusammen. Wenn dieses Magnetfeld einen bestimmten Schwellenwert überschreitet, erkennt das System das und erzeugt eine Spannung, die so genannte Hallspannung. Ein elektrischer Linearantrieb mit Positionsrückmeldung bietet Zuverlässigkeit und Genauigkeit, was die Hauptaufgabe des Hall-Sensors ist.
Das Potentiometer (POT)
Ein POT-Sensor besteht aus einem Schleifer/Schieber und zwei Endanschlüssen, die ein elektrisches Signal ausgeben. Wenn sich die Leitspindel (Spindel) des Linearaktuators dreht, ändert sich der Widerstand zwischen dem Schleifer und den beiden Endanschlüssen. Jeder Widerstandswert entspricht einer Position im Hub des Aktuators.
Reed-Sensoren
Der Reedsensor ist ein magnetischer Positionssensor. Er verfügt über einen elektrischen Schalter, der durch ein Magnetfeld betätigt wird. Es handelt sich um einen Schalter, der aus einem Paar von Kontakten besteht, die auf eisenhaltigen Metallzungen in einem versiegelten Glasgehäuse montiert sind. Die Kontakte können geöffnet und geschlossen werden, wenn ein Magnetfeld vorhanden ist, und umgekehrt (Schließen des Stromkreises und Unterbrechung der Stromzufuhr zum Elektrozylinder).
Damit ist unser Kapitel über die Komponenten eines elektrischen Linearzylinders abgeschlossen. Wir hoffen, Ihnen damit ein besseres Verständnis der Funktionsweise vermittelt zu haben. Das nächste Kapitel befasst sich mit den Sicherheitsoptionen, die in ein elektrisches Antriebssystem integriert werden können.
TiMOTION unterstützt Sie bei Ihren Antriebs-Projekten. Wenn Sie weitere Fragen haben, zögern Sie bitte nicht, sich an das nächstgelegene Verkaufsteam zu wenden!
Zugehörige Artikel

How To Choose An Electric Linear Actuator?

Kapitel 3: Sicherheitsoptionen für elektrische Linearzylinder

Electric Desk Frame for Modern and Technical Workstation

An Electric Column for the Automation of a Container Twist Lock Handler

Electric Linear Actuators Used On a Test Bench For Experimental Activities
Der Leitfaden für elektrische Linearaktuatoren

Vor- und Nachteile von elektrischen, pneumatischen und hydraulischen Linearantrieben
Kapitel 6: Elektrische Linearantriebe und Positionssensoren
Kapitel 5: IP-Schutzarten und Schmierung