2020/06/17
TiMOTION Europe 与 IMT 阿莱斯矿业学院合作创新项目!
新闻和文章

感谢位于法国南部加尔的 IMT 阿莱斯矿业学院提供机会,让我们协助他们的大四工程系学生完成机电整合机器人设计项目。
学生挑战
此学生项目是以法国替代能源与原子能委员会 (CEA) 的一份摘要为基础。CEA 的需求是开发勘测人类无法到达或危险之放射学和物理化学区域的机器人,尤其是在拆除核设施方面。他们要求学生设计出可以越过台阶、洞或楼梯等各种障碍物的可移动原型。
工程系的学生在大四期间开发出原型,从项目启动到程序设计、机械和电气设计,再到设备研发-于六个月内完成所有的工作,同时需要上课和准备考试,预算仅有 4000 美元。项目团队必须向 CEA 以及由工业家和教师组成的评审团展示机器人。
项目负责人 Clément Thomaso 提出了他的观点:「虽然是学校项目,却能引导我们摆脱通常围绕此类研究的学术体系,采用专业态度响应 CEA 发出的摘要。」
别再等待了...了解四足机器人项目!
勘测机器人是应用于扫描目标空间,包含必须放置的设备或必须控制的表面(地板或墙壁)。
这些机器人必须能满足操作需求,以及可以在由人类为人类创造的环境中移动。它们必须能越过台阶、洞或楼梯。
学生与教师合作,并选择设计-四足机器人。现在,经常可以看见此类机器的示范:最著名的是 Boston Dynamics 的「Spot」和 MIT 的「Cheetah」。
电动推杆:机器人解决方案
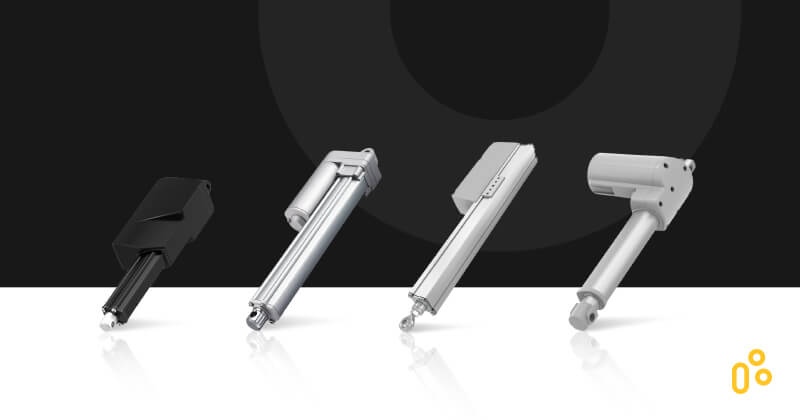
该团队选择使用四个推杆做为机器人的脚。选择 MA2 电动推杆是因为它是一种极度灵活的设备,且具有轻量化特性、推力和最佳的速度。配备霍尔传感器和大脑的机器人可以行走和移动,主要的关键是采用内建具有高精确度之电位计的MA2 电动推杆,控制移动和记忆化系统位置。IP69 防护等级则可满足高压水柱去污的极端要求。
项目负责人 Clément Thomaso 表示:
「TiMOTION 提供四个 MA2 电动推杆,为我们提供极大的帮助。缺少这一份礼物,我们将无法控制在预算内,而必须做出选择...TiMOTION 团队的参与,对我们的期末项目非常有帮助。
制造 MA2 的高质量材料,让我们能加强抓地力,确保机器人的耐用性。在美学方面,平行马达对我们来说是一项优势,90° 马达可以大幅增加机器人的宽度。」
透过协作方法诞生四足机器人
POPI 诞生了!Clément Thomaso 表示:「相互挑战及合作,让我们更进步!」
探索 POPI:

原型的前景看好...
我们希望 POPI 能为对此项目感兴趣的人创造一个社群,并成为教育或研究用途的人性化协作平台。您可以在此处找到所有的信息:https://github.com/popi-mkx3/popi_project
此项目最初是从大学项目开始,但是该团队正在寻找更多的合作伙伴,以推出新版本。
相关文章

10个使用客制化电动推杆的优点

如何挑选合适的电动直线推杆?

第3部:电动直线推杆的安全特性选择

如何同步控制电动直线推杆?

适用于现代技术工作站的电动升降桌框

电动升降立柱加速货柜扭锁装置自动化流程

应用于实验室测试平台的电动直线推杆

电动推杆应用实例:罗马大学自动驾驶赛车项目合作
电动推杆的基本指南